| Freinage |
| Moteur |
| Electricité |
| Transmission |
| Liaisons au sol |
| Auxiliaires |
| Ressources |
| Contact |
|
Sauf mention contraire |
| Freinage |
| Moteur |
| Electricité |
| Transmission |
| Liaisons au sol |
| Auxiliaires |
| Ressources |
| Contact |
|
Sauf mention contraire |
|
TEC EMAS |
EMAS |
|
| Découverte du système |
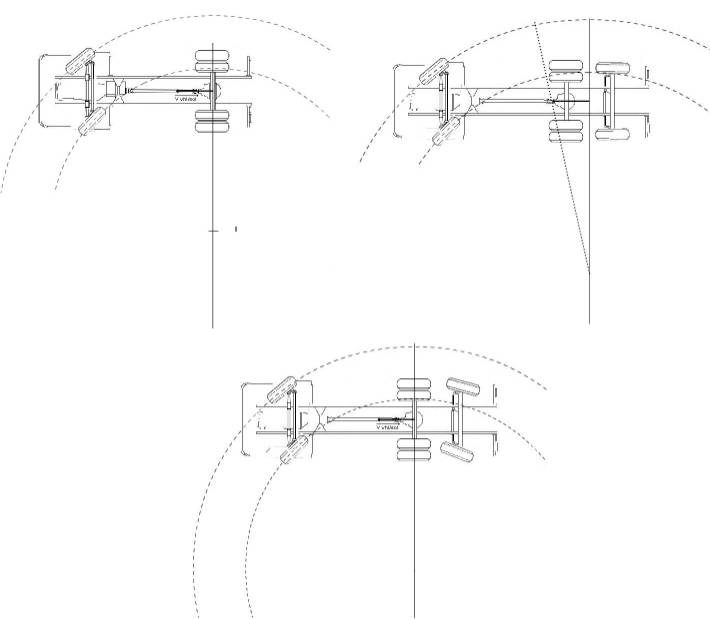
A l'aide de l'animation sur les centres instantanés de rotations
Tracé le champs des vecteurs vitesses pour les différents véhicules.
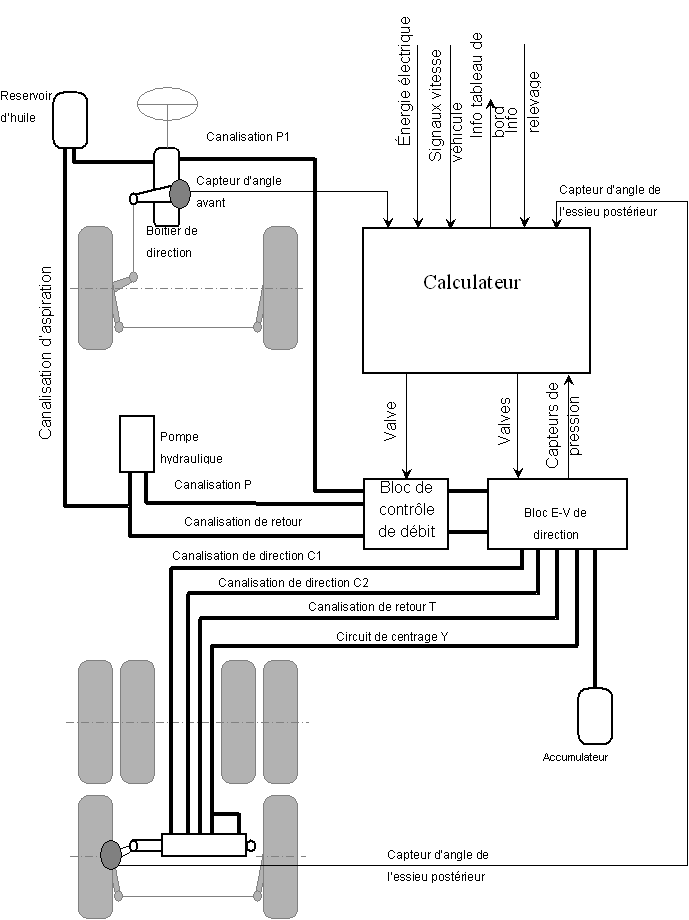
A l'aide de la documentation technique complétez la légende du schéma d'implantation des composants.
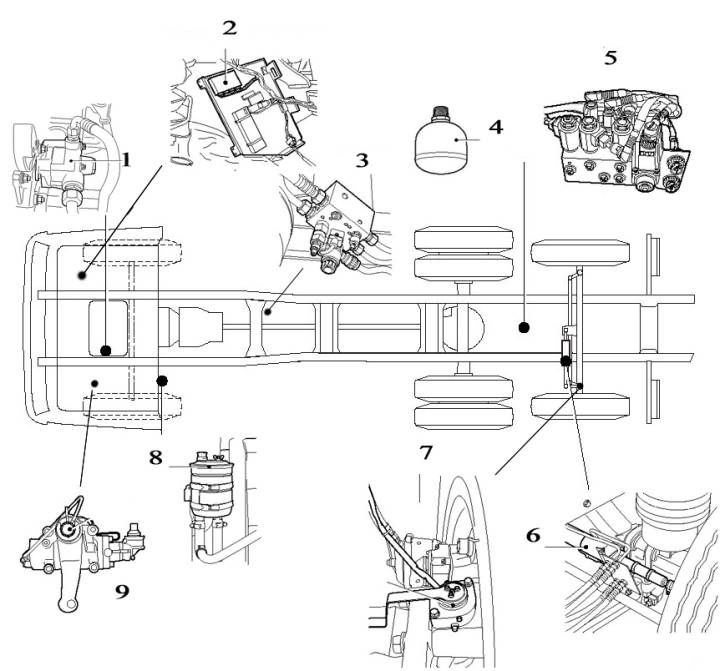
1 |
|
6 |
|
2 |
|
7 |
|
3 |
|
8 |
|
4 |
|
9 |
|
5 |
|
|
|
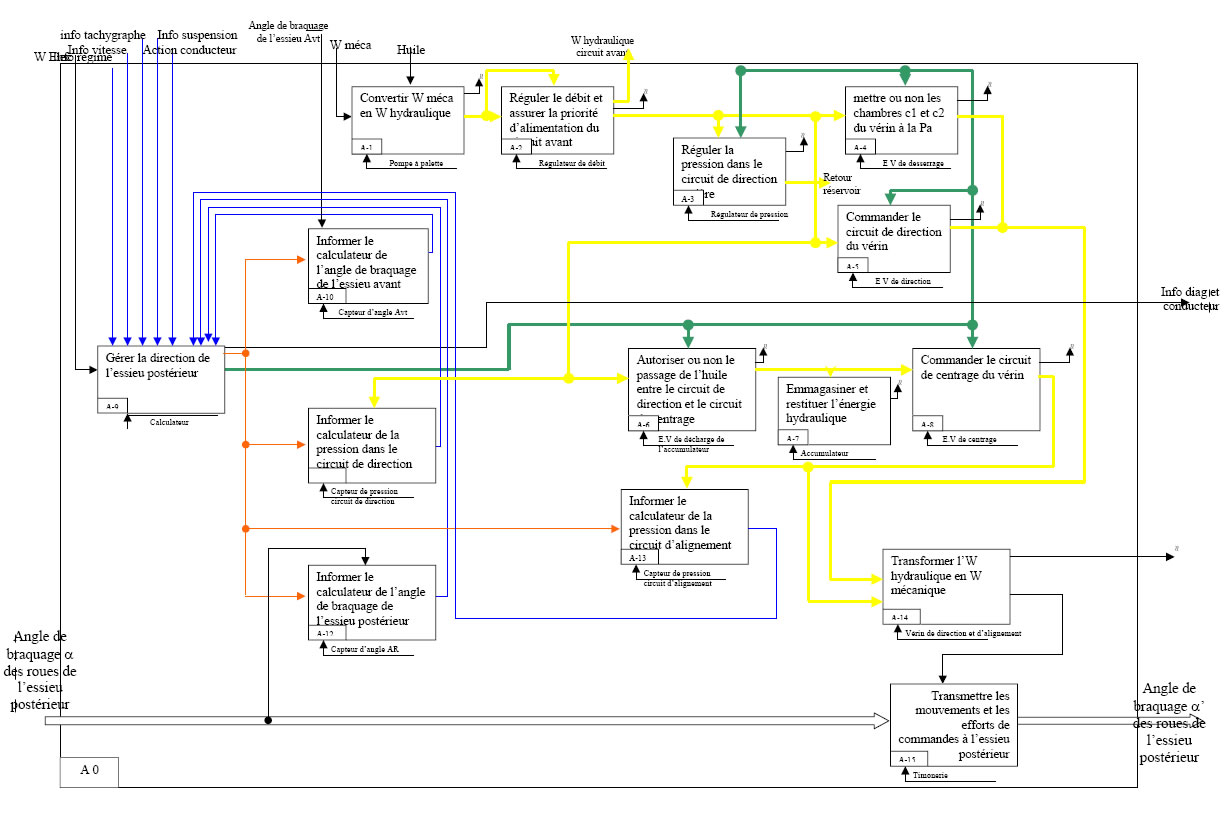
A l'aide de la documentation technique et du circuit ci dessus complétez le bilan des entrées/sorties
Entrées, informations Processeur Sorties
Le capteur d’angle de direction avant informe le calculateur de l’angle de braquage avant.
Celui ci va piloter les électrovannes afin d’obtenir l’angle de braquage souhaité.
Le calculateur est informé de l’angle arrière obtenu par le capteur d’angle arrière.
L’essieu arrière est piloté de manière régulière ( relation fixe entre l’angle avant et arrière) pour une vitesse véhicule < 25 km/h.
Entre 25 et 45 km/h l’action de l’essieu postérieur directeur diminue.
Après 45 km/h le vérin est centré et bloqué.
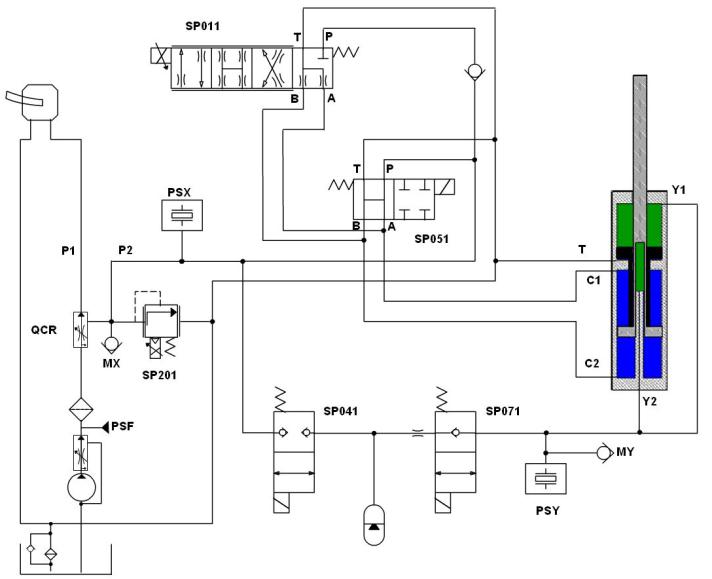
A l'aide de la documentation technique complétez la légende ci dessous
| PSF | |
|---|---|
| SP201 | |
| QCR | |
| PSX | |
| PSY | |
| SP041 | |
| SP071 | |
| SP051 | |
| SP011 |